HarmonyOS 架构深度解析:微内核为何比传统宏内核更优解?
微内核为何比 seL4 快 3 倍?
HarmonyOS 系统架构深度解析
—— 从 AOSP 到分布式操作系统的架构演进
前言
文章定位
本文面向具有一定操作系统基础的技术开发者,深入解析 HarmonyOS 的系统架构设计理念、微内核技术创新以及分布式核心能力。文章将结合上海交通大学陈海波教授的 OSDI'24 学术论文《Microkernel Goes General: Performance and Compatibility in the HongMeng Production Microkernel》的研究成果,从理论和实践两个维度剖析 HarmonyOS 的技术创新。
参考资料
- 学术论文: Haibo Chen et al. "Microkernel Goes General: Performance and Compatibility in the HongMeng Production Microkernel", OSDI'24, 2024
- 官方培训: HarmonyOS 操作系统原理和关键技术
- 系统笔记: 鸿蒙系统架构笔记
1. 为什么需要新的操作系统架构?
本章要点: 理解万物互联时代对操作系统的新需求,以及传统架构面临的技术瓶颈。
1.1 万物互联时代的挑战
随着智能设备的爆发式增长,用户拥有的智能终端数量从单一手机扩展到手机、平板、手表、电视、车机、音箱等多种形态。这些设备需要无缝协同工作,而传统操作系统架构难以满足这一需求。
根据 OSDI'24 论文的分析,新兴场景对操作系统提出了前所未有的要求:
| 场景 | IPC 频率(平均) | 系统调用频率 | 特点 |
|---|---|---|---|
| 智能路由器 | 0.6k/s | 4.6k/s | 类似传统嵌入式场景 |
| 智能汽车 | 7k/s | - | 中等复杂度,安全关键 |
| 智能手机 | 41k/s | 61k/s | 高度复杂,IPC 密集 |
1.2 传统架构的局限性
1.2.1 AOSP 正三角形架构问题
AOSP(Android Open Source Project)采用传统的水平分层架构,其架构形态类似于正三角形——顶端应用层窄,底部内核层宽。
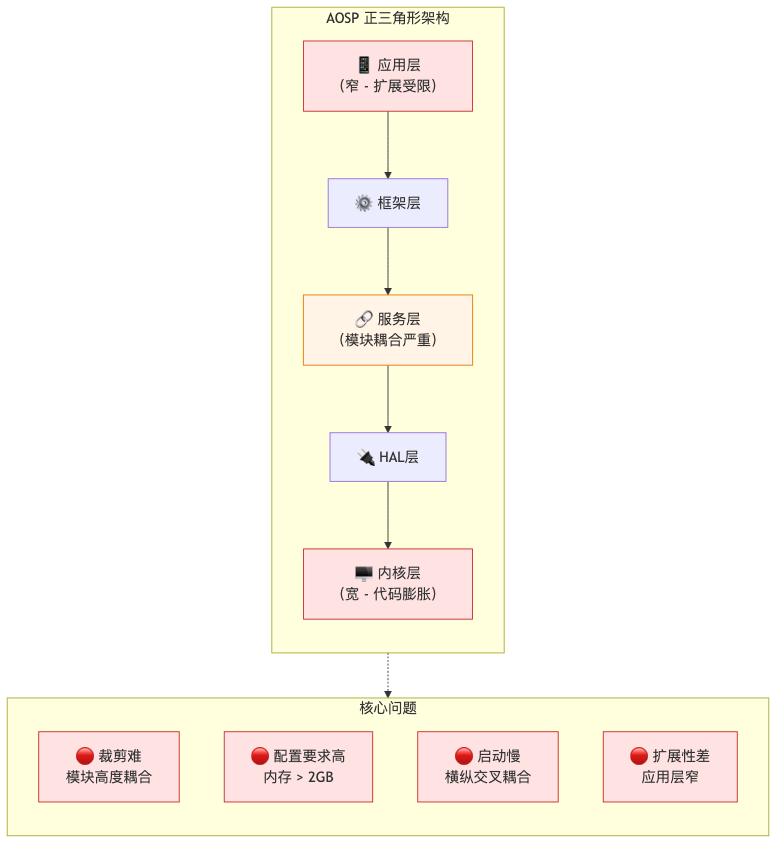
图 1.2.1 AOSP 正三角形架构问题
核心局限性:
-
水平分层,层内耦合严重
- 裁剪某个模块可能导致依赖模块失效
- 难以适配资源受限的 IoT 设备
-
代码膨胀,硬件配置要求高
- 内存最低配置 > 2GB
- 对车载、IoT 等场景成本过高
-
横纵交叉耦合,系统启动慢
- 不适合车载等频繁上下电设备
- 用户体验受影响
1.2.2 IPC 性能瓶颈
OSDI'24 论文指出,传统微内核的 IPC 性能是制约其在通用场景应用的关键因素:
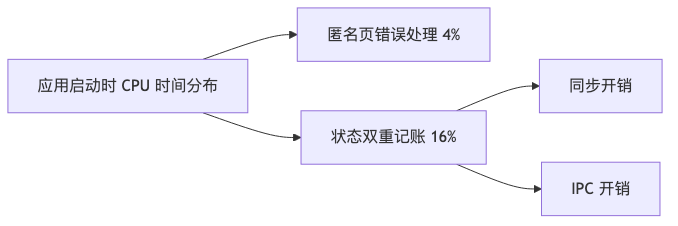
图 1.2.2 IPC 性能瓶颈
在智能手机应用启动过程中,约 20% 的 CPU 时间消耗在微内核固有的开销上,这包括:
- 基于能力(Capability)的匿名页错误处理
- 内存管理器与文件系统之间的状态双重记账
1.2.3 Linux 内核的安全隐患
Linux 作为宏内核,虽然性能优秀,但存在严重的安全问题:
- 80% 的 CVE 漏洞来自文件系统和设备驱动
- 针对服务器/云场景优化,不利于其他场景定制
- 定制化与上游同步困难
1.3 HarmonyOS 的设计目标
HarmonyOS 的设计目标是构建一个面向万物互联的分布式操作系统,核心设计理念可以概括为:
架构设计 + 分布式能力 = HarmonyOS
三大设计原则(来自 OSDI'24 论文 Table 1):
| 原则 | 说明 | 实现方式 |
|---|---|---|
| 保持最小化 | 核心内核仅包含必要组件 | 线程调度器 + 串口/定时器驱动 + 访问控制 |
| 性能优先 | 提供结构化支持适应不同场景 | 差异化隔离等级、同步 RPC 式 IPC |
| 最大化生态兼容 | 实现完整的 Linux API/ABI 兼容 | ABI 兼容层 + 驱动容器 |
2. HarmonyOS 架构全景
本章要点: 理解 HarmonyOS 的分层架构、倒三角形设计理念,以及与 AOSP 的本质区别。
2.1 倒三角形架构设计理念
与 AOSP 的正三角形相反,OpenHarmony 采用创新的倒三角形架构:
- 顶端: 应用层(宽)—— 强大的扩展能力
- 底部: 内核层(窄)—— 精简的核心功能

图 2.1 倒三角形架构设计理念
2.2 纵向分层、横向解耦
HarmonyOS 采用分层架构设计,从下至上分为内核层、系统服务层、应用框架层和应用层。整体架构遵循"纵向分层、横向解耦"的设计原则。
架构理解维度:
- 纵向维度: 从浅到深,应用层是用户最容易接触到的层面,内核层是用户最难接触到的底层
- 横向维度: 同等级别的相关系统集和应用能力,彼此独立又相互协作
| 层级 | 核心内容 | 主要功能 |
|---|---|---|
| 应用层 | 系统应用、桌面、控制栏、设置、电话等 | 提供用户直接交互的应用程序 |
| 应用框架层 | UI框架、元服务/元能力框架、分布式任务调度等 | 为应用开发提供统一的开发接口和能力 |
| 系统服务层 | 基础/增强软件服务子系统集、硬件服务子系统集 | 提供系统级服务和硬件抽象 |
| 内核层 | Linux Kernel、LiteOS、HDF统一驱动框架 | 提供操作系统内核和硬件驱动支持 |
2.3 乐高化模块设计
系统各模块如同乐高积木,可以根据不同设备的硬件配置和功能需求,灵活地抽离或组合系统组件。
2.3.1 模块化架构原理

图 2.3.1 模块化架构原理
2.3.2 不同设备的模块组合示例
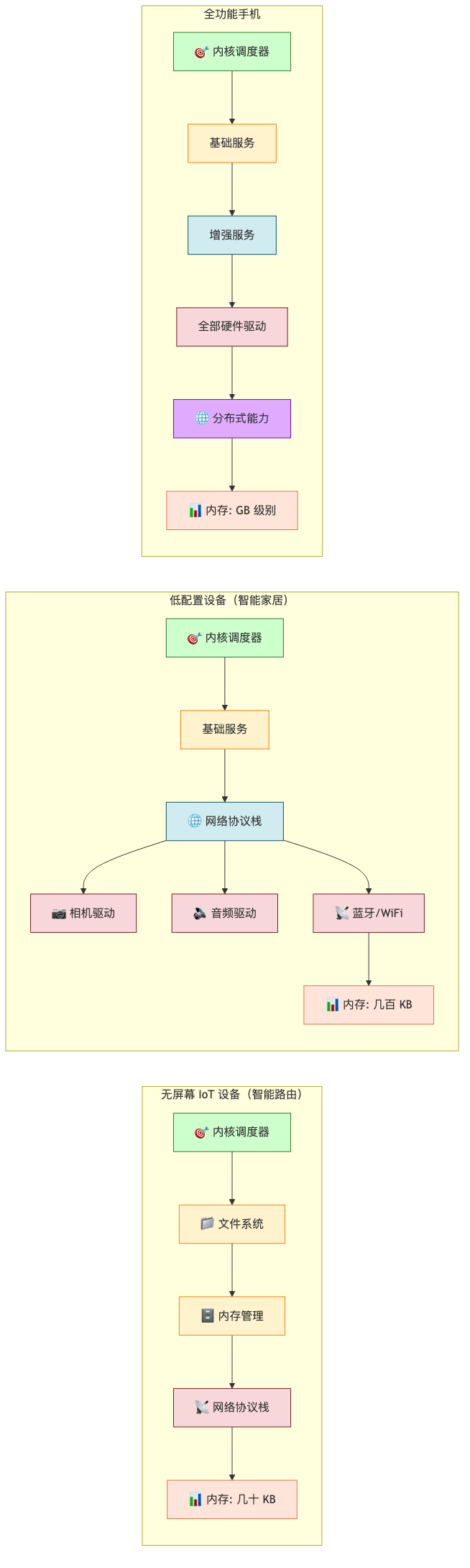
图 2.3.2 不同设备的模块组合示例
设计核心特征:
| 特征 | 说明 | 技术实现 |
|---|---|---|
| 模块独立 | 每个模块独立封装,无强依赖 | 标准化接口,低耦合设计 |
| 灵活组合 | 根据设备需求自由拼装 | 组件声明式加载 |
| 启动快速 | 按需加载,减少初始化开销 | 横向解耦,无交叉依赖 |
| 易于裁剪 | 不需要的模块直接移除 | 编译时/运行时动态配置 |
| 分布式能力 | 统一抽象,跨设备协同 | 软总线 + 虚拟 HAL |
2.4 AOSP 与 OpenHarmony 架构对比
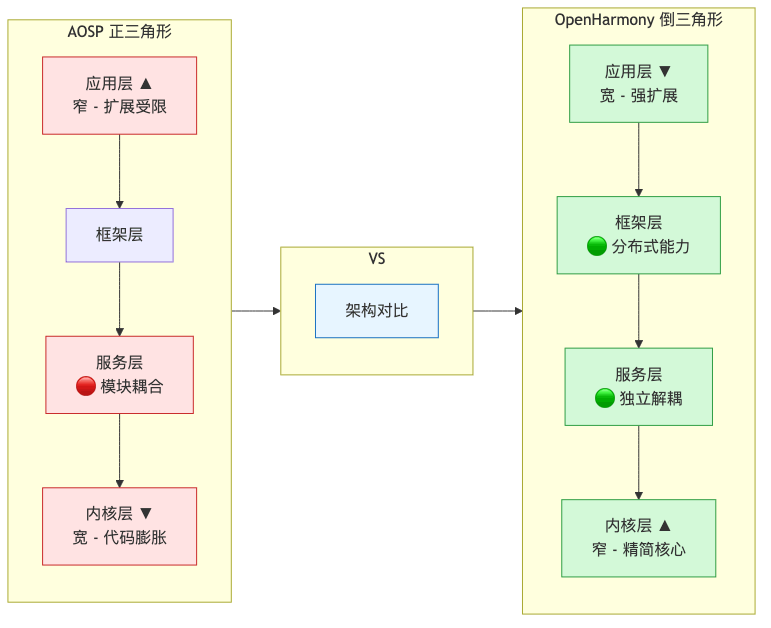
图 2.4 AOSP 与 OpenHarmony 架构对比
核心差异对比表
| 对比维度 | AOSP | OpenHarmony |
|---|---|---|
| 架构形态 | 正三角形(应用层窄,内核层宽) | 倒三角形(应用层宽,内核层窄) |
| 分层特性 | 水平分层,层内模块耦合严重 | 上下水平分层,组件独立部署 |
| 扩展性 | 应用层扩展受限 | 应用层扩展性强,天然支持多设备 |
| 裁剪能力 | 裁剪难度大,模块间强依赖 | 按需裁剪,乐高化组合 |
| 启动速度 | 启动慢,需加载大量耦合模块 | 启动快,按需加载 |
| 内存要求 | 最低 > 2GB | 从几十KB(IoT)到GB(全功能设备) |
| 渲染架构 | APP独立渲染,窗口渲染合成 | 后端统一渲染,支持跨应用动效 |
| 分布式能力 | 无原生分布式支持 | 原生分布式架构 |
| 硬件虚拟化 | 不支持 | 支持 6 类外设虚拟化 |
2.5 设计理念对比
AOSP 设计理念:
- 以单设备为中心
- 强调系统稳定性和兼容性
- 生态优先,架构相对保守
OpenHarmony 设计理念:
- 以人为中心,将多设备抽象为"超级终端"
- 强调分布式协同和跨设备能力
- 架构创新,面向未来的万物互联
3. 微内核创新:HongMeng 内核技术剖析
本章要点: 深入理解 OSDI'24 论文的核心技术贡献,包括差异化隔离等级、同步 RPC 式 IPC、地址令牌访问控制等关键创新。
3.1 微内核设计哲学
HongMeng(HM)微内核的核心设计理念是尊重微内核原则但不走极端,在保持微内核安全可靠优势的同时,通过精心的权衡解决性能和兼容性挑战。
与传统操作系统的本质区别
| 特性 | 传统微内核 | 混合内核(NT/XNU) | HongMeng |
|---|---|---|---|
| 最小化 | 最小内核 | 代码解耦 | 最小微内核 + 隔离的最小权限 OS 服务 |
| IPC | IPC 快速路径 | 函数调用 | 同步 RPC 解决资源分配/耗尽/计费问题 |
| 隔离 | 用户空间服务 | 与内核合并 | 差异化隔离等级(IC0/IC1/IC2) |
| 组合 | 静态多服务器 | 静态单服务器 | 灵活组合,适应不同场景 |
| 访问控制 | 基于能力 | 对象管理器 | 地址令牌支持高效内核对象协同管理 |
| 内存分页 | 用户空间分页 | 内核分页 | 服务中集中管理 + 内核无策略分页 |
| 应用接口 | POSIX 兼容 | POSIX+BSD/Win | 通过 ABI 兼容层实现 Linux API/ABI 兼容 |
| 设备驱动 | 移植/虚拟机 | 原生驱动 | 驱动容器 + 孪生驱动高效复用 Linux 驱动 |
3.2 差异化隔离等级(IC0/IC1/IC2)
HongMeng 微内核的核心创新之一是差异化隔离等级设计,提供三级隔离体系以平衡安全性和性能。
3.2.1 三级隔离体系设计
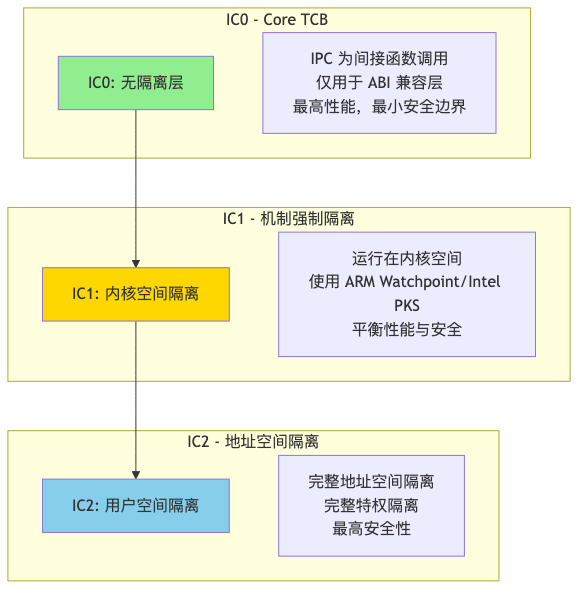
图 3.2.1 三级隔离体系设计
| 隔离等级 | 运行空间 | 隔离机制 | 适用场景 |
|---|---|---|---|
| IC0 | 内核空间 | 无隔离(间接函数调用) | ABI 兼容层,性能关键路径 |
| IC1 | 内核空间 | ARM Watchpoint / Intel PKS | 合并的 OS 服务(FS + MM + PM) |
| IC2 | 用户空间 | 完整地址空间 + 特权隔离 | 驱动容器、独立服务 |
3.2.2 IPC 性能数据对比
根据 OSDI'24 论文在 Raspberry Pi 4b 上的测试数据:
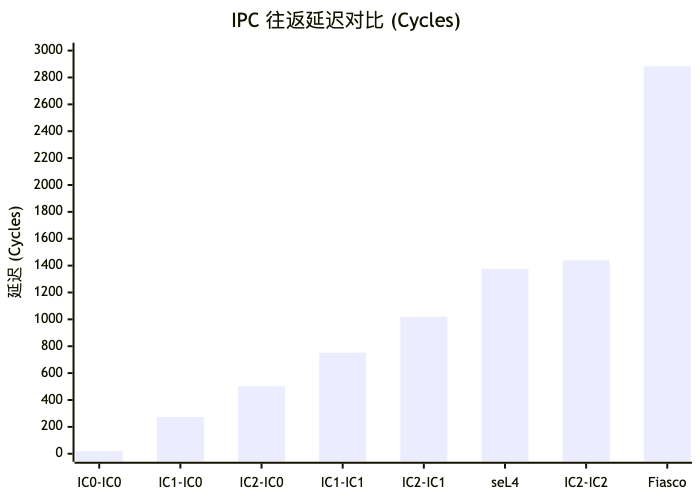
图 3.2.2 IPC 性能数据对比
| 配置 | 往返延迟 (Cycles) | 对比 seL4 |
|---|---|---|
| IC0-IC0 | 18 | 快 76 倍 |
| IC1-IC0 | 272 | 快 5 倍 |
| IC1-IC1 | 502 | 快近 3 倍 |
| IC2-IC1 | 1020 | 快 35% |
| seL4 | 1376 | 基准 |
| IC2-IC2 | 1439 | 相当 |
| Fiasco.OC | 2883 | 慢 2.1 倍 |
关键发现: IC1-IC1 配置仅需 502 cycles,比 seL4 快近 3 倍,这使得微内核在智能手机等 IPC 密集场景下具有实用性。
3.3 同步 RPC 式 IPC 快速路径
传统微内核的异步 IPC 存在三个关键问题:资源分配、资源耗尽、资源计费。HongMeng 通过同步 RPC 式 IPC 设计解决了这些问题。
3.3.1 设计原理
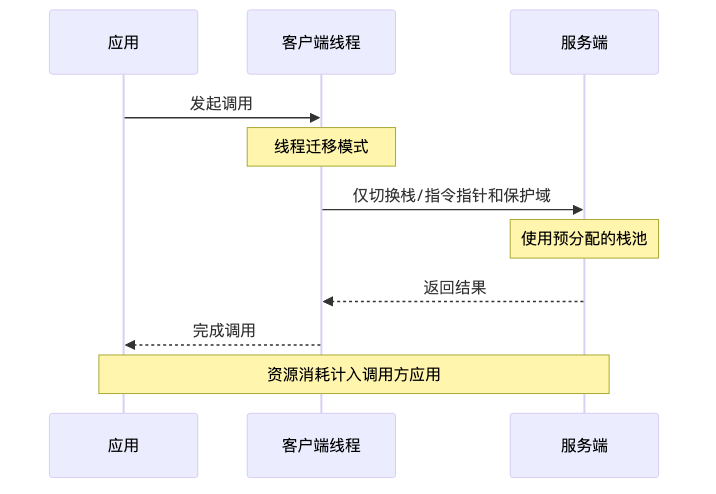
图 3.3.1 设计原理
3.3.2 资源管理策略
| 问题 | 解决方案 |
|---|---|
| 资源分配 | 预绑定 + 自适应调整栈池大小 |
| 资源耗尽 | 预留独立栈池用于 OOM 时的内存回收 |
| 资源计费 | 追踪根调用者,将资源消耗精确计入调用方应用 |
3.4 地址令牌访问控制
传统微内核使用基于能力(Capability)的访问控制机制,虽然安全但性能开销大。HongMeng 引入地址令牌机制,大幅提升访问效率。
3.4.1 与传统 Capability 机制对比
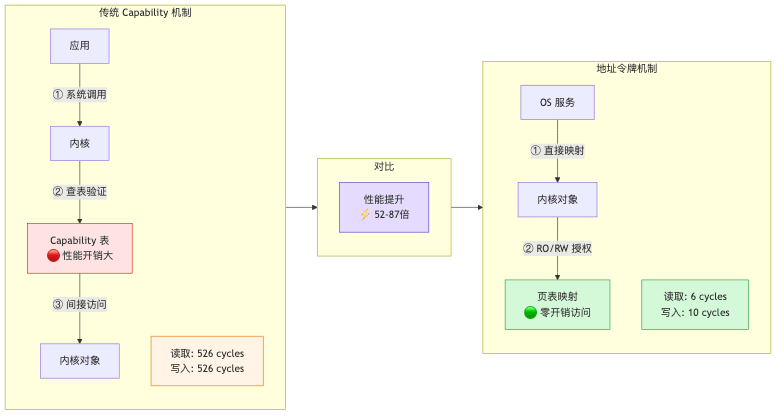
图 3.4.1 与传统 Capability 机制对比
3.4.2 性能对比数据
| 操作 | 地址令牌 | seL4 Capability | 性能提升 |
|---|---|---|---|
| 读取 | 6 cycles | 526 cycles | 87 倍 |
| 写入 | 10 cycles | 526 cycles | 52 倍 |
工作机制:
- 将内核对象映射到 OS 服务地址空间
- 支持 RO(只读)和 RW(读写)两种授权模式
- RW 对象可直接更新,RO 对象通过 writev 系统调用更新
3.5 无策略内核分页
传统微内核的页错误处理需要通过 IPC 与内存管理器通信,开销较大。HongMeng 采用无策略内核分页设计,大幅减少 IPC 次数。
3.5.1 工作流程
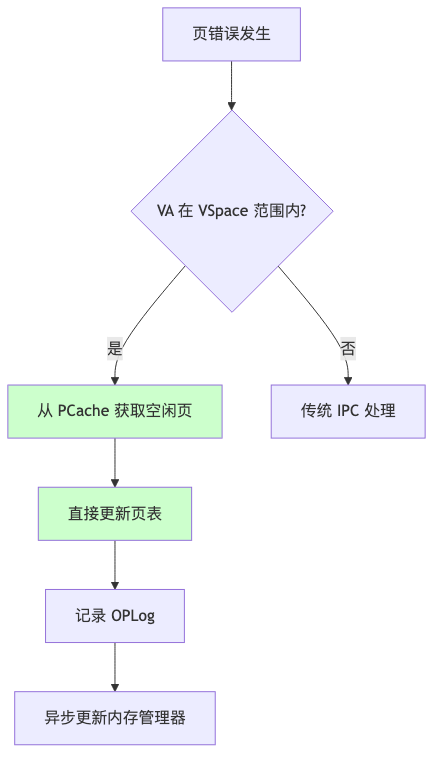
图 3.5.1 工作流程
3.5.2 性能数据
| 平台 | 操作 | HongMeng | Linux | Fiasco | 对比 Linux |
|---|---|---|---|---|---|
| Pi4b | 读取 | 244ns | 395ns | 1469ns | 快 38% |
| Pi4b | 写入 | 772ns | 656ns | - | 慢 18% |
| Kirin9000 | 读取 | 456ns | 551ns | - | 快 17% |
| Kirin9000 | 写入 | 1816ns | 1921ns | - | 快 5% |
3.6 驱动容器与孪生驱动
为实现 Linux 驱动的高效复用,HongMeng 设计了驱动容器和孪生驱动架构。
3.6.1 Linux 驱动复用机制
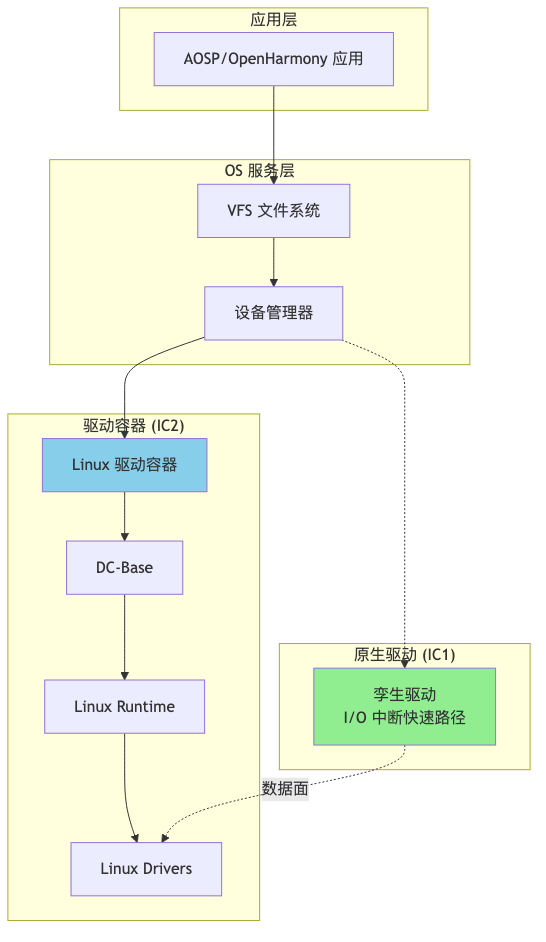
图 3.6.1 Linux 驱动复用机制
3.6.2 控制面/数据面分离
| 路径类型 | 处理位置 | 说明 |
|---|---|---|
| 控制面 | Linux 驱动容器 (IC2) | 初始化、唤醒等非关键路径 |
| 数据面 | 孪生驱动 (IC1) | I/O 中断处理等性能关键路径 |
性能数据 (Block I/O 吞吐量,Kirin9000):
| 配置 | 吞吐量 | 对比 |
|---|---|---|
| DC-solo (未分离) | ~500 MB/s | 基准 |
| DC-twin (分离) | ~1200 MB/s | 快 140% |
| Linux | ~1200 MB/s | 相当 |
驱动复用成果: 成功复用超过 700 个 Linux 驱动,覆盖相机、显示、音频、NPU/GPU、存储等关键领域。
4. 分布式核心能力
本章要点: 理解 HarmonyOS 的分布式软总线、硬件虚拟化、元数据驱动编程等核心能力。
4.1 分布式软总线
4.1.1 基本原理与四大功能
分布式软总线是 HarmonyOS 分布式能力的基础设施,不是通讯协议,而是一个统一的连接和通信管理平台。
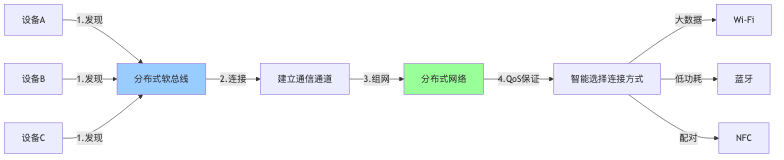
图 4.1.1 基本原理与四大功能
四大核心功能:
| 功能 | 说明 |
|---|---|
| 发现 | 自动发现周边可信设备 |
| 连接 | 建立设备间的通信连接 |
| 组网 | 将多个设备组成分布式网络 |
| QoS 保证 | 根据场景智能选择最佳连接方式 |
4.1.2 连接方式智能选择
| 连接方式 | 特点 | 适用场景 |
|---|---|---|
| Wi-Fi | 高带宽、低延迟 | 大数据传输 |
| 蓝牙 | 低功耗 | 近距离连接 |
| NFC | 极近距离 | 配对和身份认证 |
4.2 分布式硬件虚拟化
4.2.1 HAL 扩展概念
传统 HAL(Hardware Adaptation Layer)将硬件抽象成一组软件 API 供上层调用。HarmonyOS 基于软总线的概念进行扩展:
跨物理终端的 HAL 访问 —— 在终端 A 上通过虚拟 HAL 去访问终端 B 上的真实硬件
4.2.2 六类外设虚拟化
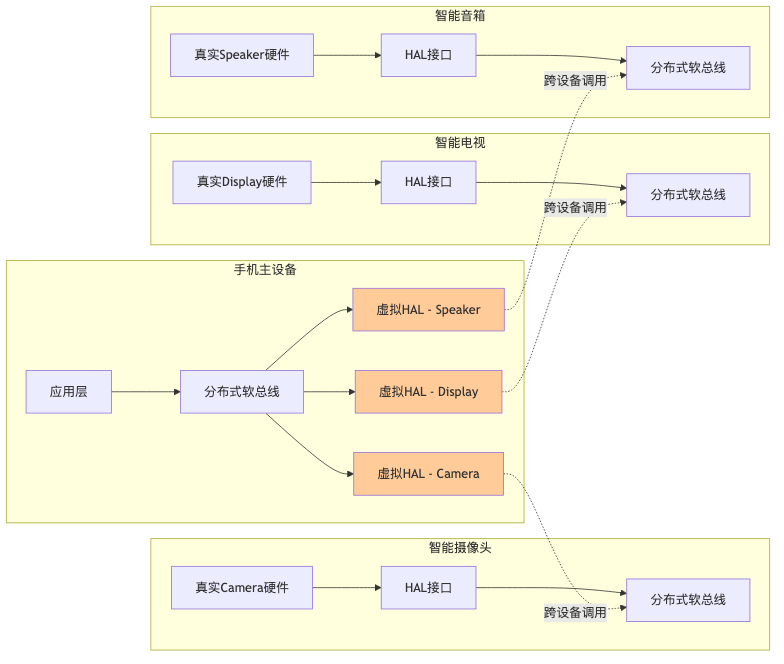
图 4.2.2 六类外设虚拟化
| 外设类型 | 功能 | 应用场景 |
|---|---|---|
| Camera | 跨设备拍照录像 | 手机调用智能摄像头 |
| MIC | 跨设备语音输入 | 平板使用手机麦克风 |
| Speaker | 跨设备音频输出 | 手机音频输出到音箱 |
| Keyboard | 跨设备文本输入 | 手机使用蓝牙键盘 |
| Display | 跨设备屏幕显示 | 手机投屏到电视 |
| Touch | 跨设备触控交互 | 平板控制手机界面 |
4.2.3 跨设备能力调用示例
/**
* 分布式硬件调用示例
* 在手机上调用智能电视的显示能力
*/
import deviceManager from '@ohos.distributedHardware.deviceManager'
import display from '@ohos.display'
class DistributedDisplayDemo {
private dmInstance: deviceManager.DeviceManager | null = null
/**
* 初始化设备管理器
*/
async initDeviceManager(): Promise<void> {
this.dmInstance = await deviceManager.createDeviceManager('com.example.app')
}
/**
* 发现周边可用的显示设备
*/
async discoverDisplayDevices(): Promise<deviceManager.DeviceInfo[]> {
if (!this.dmInstance) {
throw new Error('DeviceManager not initialized')
}
// 获取可信设备列表
const devices = this.dmInstance.getTrustedDeviceListSync()
// 过滤支持 Display 能力的设备
return devices.filter(device =>
device.deviceType === deviceManager.DeviceType.TV
)
}
/**
* 将内容投射到远程显示设备
* @param deviaceId 目标设备ID
* @param content 要显示的内容
*/
async castToRemoteDisplay(deviceId: string, content: Resource): Promise<void> {
// 创建虚拟 Display HAL
const virtualDisplay = await display.createVirtualScreen({
name: 'RemoteDisplay',
width: 1920,
height: 1080,
density: 160,
surface: null,
deviceId: deviceId // 指定远程设备
})
// 在远程设备上显示内容
// 系统会自动通过分布式软总线传输数据
console.info(`Content cast to device: ${deviceId}`)
}
}
4.2.4 分布式能力工作流程
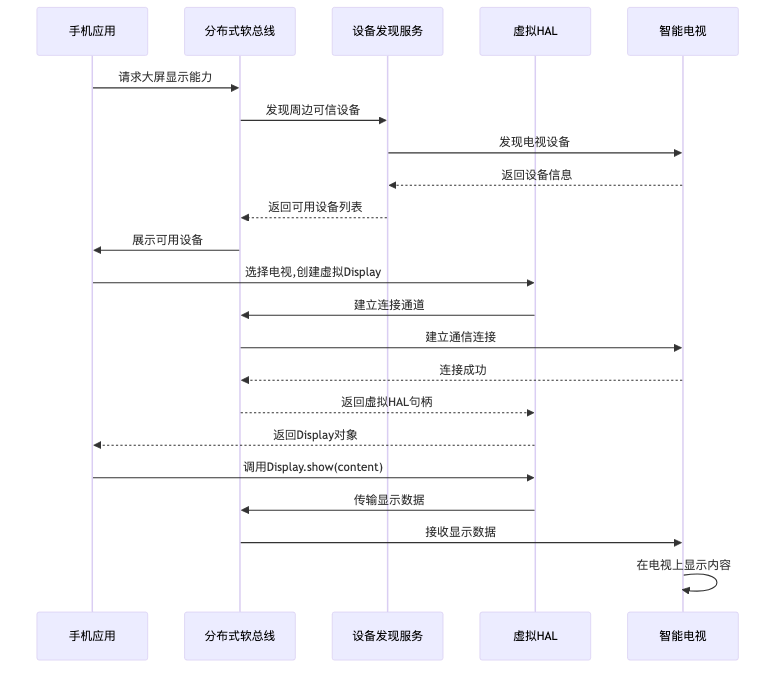
图 4.2.4 分布式能力工作流程
4.3 元数据共享对象驱动编程
4.3.1 设计思想
元数据可以简单理解为分布式的全局变量,是一种基于数据驱动的跨设备编程模式。
传统组件协作的问题:
- 超级终端内,组件间的协作比单机上可能更频繁
- 组件的接口(IDL)变化更多,需要频繁增改接口
- 组件间协同大部分是基于数据的协同
元数据驱动的优势:
- 无需关注通讯逻辑,组件间不直接通过接口协作
- 设计共享的元数据,组件函数分别绑定并响应数据变化
- 数据变化自动触发相关组件更新
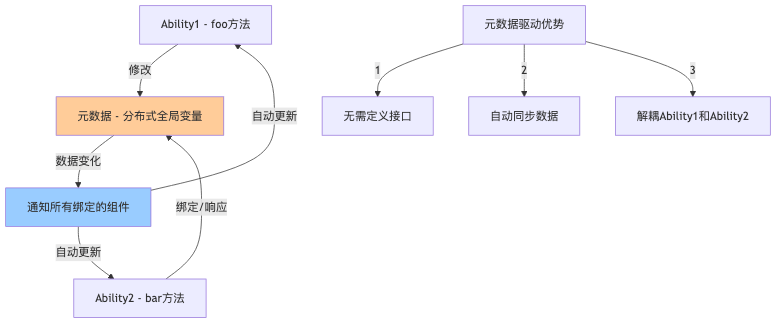
图 4.3.1 设计思想
4.3.2 代码示例
/**
* 元数据类定义
* 使用 @ObservedV2 装饰器使其具有响应式能力
*/
@ObservedV2
class SharedLocationData {
@Trace userLocation: GeoLocation = { latitude: 0, longitude: 0 }
@Trace deviceStatus: string = 'idle'
@Trace lastUpdateTime: number = 0
}
// 创建全局共享实例
const sharedData = new SharedLocationData()
/**
* NavigationAbility: 位置数据生产者
* 负责更新用户位置信息
*/
@Entry
@Component
struct NavigationAbility {
@StorageLink('sharedLocation') locationData: SharedLocationData = sharedData
/**
* 更新用户位置
* 修改元数据会自动通知所有订阅者
*/
updateLocation(newLocation: GeoLocation): void {
this.locationData.userLocation = newLocation
this.locationData.lastUpdateTime = Date.now()
}
build() {
Column() {
Button('更新位置')
.onClick(() => {
// 模拟 GPS 更新
this.updateLocation({
latitude: 31.2304,
longitude: 121.4737
})
})
}
}
}
/**
* MapDisplayAbility: 位置数据消费者
* 自动响应位置变化并更新地图显示
*/
@Entry
@Component
struct MapDisplayAbility {
@StorageLink('sharedLocation') locationData: SharedLocationData = sharedData
build() {
Column() {
// 自动响应 userLocation 的变化
Text(`当前位置: ${this.locationData.userLocation.latitude}, ${this.locationData.userLocation.longitude}`)
Text(`更新时间: ${new Date(this.locationData.lastUpdateTime).toLocaleString()}`)
// 地图组件会自动根据位置变化重新渲染
MapComponent({
center: this.locationData.userLocation
})
}
}
}
4.4 分布式数据管理
分布式数据管理实现数据的跨设备同步,提供以下关键能力:
| 能力 | 说明 |
|---|---|
| 数据一致性保证 | 确保多设备数据最终一致 |
| 冲突解决机制 | 自动处理并发修改冲突 |
| 增量同步 | 仅同步变化的数据,节省带宽 |
| 离线支持 | 支持离线修改,联网后自动同步 |
/**
* 分布式数据库使用示例
*/
import distributedData from '@ohos.data.distributedData'
class DistributedDataDemo {
private kvStore: distributedData.SingleKVStore | null = null
/**
* 初始化分布式 KV 数据库
*/
async initKVStore(): Promise<void> {
const kvManager = await distributedData.createKVManager({
bundleName: 'com.example.app',
context: getContext(this)
})
const options: distributedData.Options = {
createIfMissing: true,
encrypt: false,
backup: false,
autoSync: true, // 启用自动同步
kvStoreType: distributedData.KVStoreType.SINGLE_VERSION
}
this.kvStore = await kvManager.getKVStore('myStore', options)
}
/**
* 写入数据(自动同步到其他设备)
*/
async putData(key: string, value: string): Promise<void> {
await this.kvStore?.put(key, value)
}
/**
* 读取数据(可能来自本地或远程设备)
*/
async getData(key: string): Promise<string> {
return await this.kvStore?.get(key) as string
}
/**
* 订阅数据变化
*/
subscribeDataChange(callback: (changes: distributedData.ChangeNotification) => void): void {
this.kvStore?.on('dataChange', distributedData.SubscribeType.SUBSCRIBE_TYPE_ALL, callback)
}
}
5. 超级终端抽象模型
本章要点: 理解以人为中心的设计理念,以及虚拟资源、虚拟外设的抽象模型。
5.1 以人为中心的设计理念
HarmonyOS 的核心理念是以人为中心,将用户周边的多个智能设备抽象成一个"超级终端",通过分布式软总线进行统一调度和管理。
用户体验层面 —— 如同使用一个超级设备:
- 手机拍照可以使用智能摄像头
- 手机播放视频可以投屏到电视
- 平板输入可以使用蓝牙键盘
- 手表查看导航可以显示在车机屏幕
应用开发者层面 —— 基于抽象的超级终端开发:
- 声明需要的能力(如摄像头、屏幕、GPS)
- 调用分布式 API
- 系统自动选择最佳的设备提供能力
5.2 虚拟资源与虚拟外设
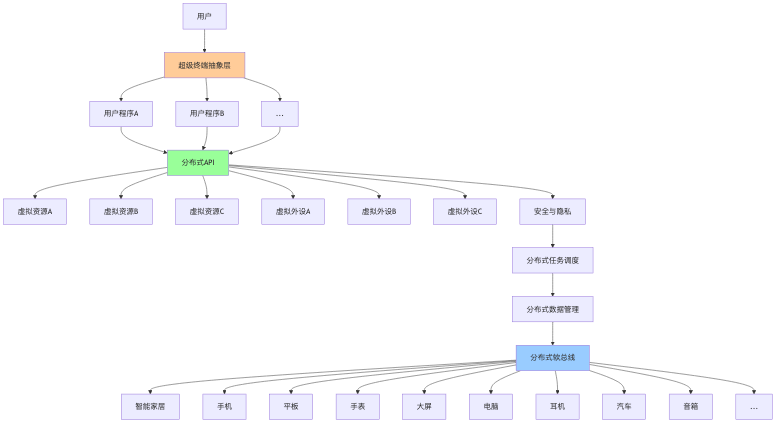
图 5.2 虚拟资源与虚拟外设
5.3 分布式任务调度
分布式任务调度智能分配任务到最佳设备,考虑因素包括:
| 评估维度 | 说明 |
|---|---|
| 计算能力 | 选择算力匹配的设备执行任务 |
| 电量状态 | 避免在低电量设备执行重任务 |
| 网络状况 | 根据网络质量选择通信策略 |
| 用户偏好 | 尊重用户的设备使用习惯 |
5.4 安全与隐私保障
超级终端的安全架构包含多层保障:
| 安全层 | 功能 |
|---|---|
| 设备认证 | 确保只有可信设备加入超级终端 |
| 数据加密 | 端到端加密,防止数据泄露 |
| 权限管理 | 细粒度控制设备间的能力访问 |
| 隐私保护 | 敏感数据不离开本地设备 |
5.5 架构层级详解
分布式 API 层: 提供跨设备调用的统一接口
- 虚拟资源抽象(计算、存储、网络)
- 虚拟外设抽象(Camera、Display、Speaker 等)
安全与隐私层: 确保设备间通信的安全性
- 设备身份认证(基于分布式安全标识)
- 传输加密(TLS/DTLS)
- 访问权限验证
分布式任务调度: 智能分配任务到最佳设备
- 设备能力评估
- 负载均衡
- 故障转移
分布式数据管理: 实现数据的跨设备同步
- 分布式数据库
- 分布式文件系统
- 数据订阅与推送
分布式软总线: 底层的设备连接和通信基础设施
- 设备发现(CoAP/mDNS)
- 连接建立(TCP/UDP/BLE)
- 数据传输(可靠/不可靠)
- QoS 保证
6. 图形渲染系统创新
本章要点: 理解 OpenHarmony 统一渲染架构相对于 AOSP 独立渲染的优势。
6.1 AOSP 图形架构局限
6.1.1 独立渲染问题
AOSP 采用应用独立渲染架构,存在以下问题:
-
渲染进程无法获得其他应用渲染信息
- 无法做应用间的"空间动效"
- 应用窗口存在遮挡时会重复渲染
-
受 HWC 层数限制
- HWC(Hardware Composer)硬件合成器通常限制 ≤6 层
- 无法很好支持 PC、车机、投屏等多窗口场景
6.2 OpenHarmony 统一渲染架构
6.2.1 核心设计
OpenHarmony 摒弃了 AOSP 的多窗口独立渲染架构,采用业界领先的后端统一渲染架构:

图 6.2.1 核心设计
6.2.2 DDGR 引擎 + Vulkan
OpenHarmony 的图形系统采用全新技术栈:
| 组件 | 说明 |
|---|---|
| DDGR 引擎 | 全新 2D 渲染引擎,优化多线程渲染 |
| Vulkan | 低开销图形 API,充分发挥 GPU 算力 |
| 脏区域渲染 | 只渲染变化的区域,大幅减少 GPU 开销 |
| Draw OP 合并 | 合并绘制操作,减少 GPU 状态切换 |
6.2.3 脏区域渲染优化
渲染管线流程:
Render (渲染后端并行化)
↓
Dirty Regions (脏区域检测)
↓
Draw OP 合并 (绘制操作优化)
↓
DDGR Render Engine (高性能 2D 引擎)
↓
脏区域渲染优化 (减少不必要渲染)
6.3 性能对比数据
| 对比项 | AOSP | OpenHarmony |
|---|---|---|
| 渲染架构 | 应用独立渲染 | 后端统一渲染 |
| 跨应用动效 | 不支持 | 支持 |
| 窗口层数限制 | HWC 限制(通常≤6层) | 无限制 |
| 重复渲染问题 | 存在遮挡重复渲染 | 遮挡剔除算法优化 |
| 多屏多窗口 | 性能受限 | GPU 算力充分发挥 |
| 脏区域渲染 | 支持 | 优化的脏区域渲染 |
| 渲染引擎 | Skia | DDGR + Vulkan |
| 适用场景 | 手机、平板 | 手机、平板、PC、车机、投屏 |
根据 OSDI'24 论文的性能测试:
| 指标 | HongMeng 表现 | 对比 Linux |
|---|---|---|
| 帧丢失次数 | 减少 10% | - |
| 帧丢失标准差 | 降低 20% | 更稳定 |
| 视频中断延迟 | 减少 10% | - |
| 音频中断延迟 | 减少 65% | - |
7. 一次开发多端部署
本章要点: 掌握 HarmonyOS 的工程级、功能级、界面级多端适配能力。
7.1 工程级能力
HarmonyOS 支持在同一工程中管理多个设备的代码和资源:
| 能力 | 说明 |
|---|---|
| 多设备工程管理 | 共享公共代码,按设备类型组织特定代码 |
| 多目标构建 | 一次构建生成多个设备的安装包 |
| 一体化打包 | 将多设备安装包打包成一个 APP 包 |
7.2 功能级能力
同一特性多端运行
逻辑与 UI 解耦: 业务逻辑代码可在不同设备上运行,UI 根据设备特性自适应。
跨端接口差异化屏蔽: 框架层屏蔽不同设备的接口差异,开发者使用统一的 API。
7.3 界面级能力
7.3.1 自适应布局
组件根据容器大小自动调整尺寸和位置,支持百分比布局和Flex弹性布局两种模式:
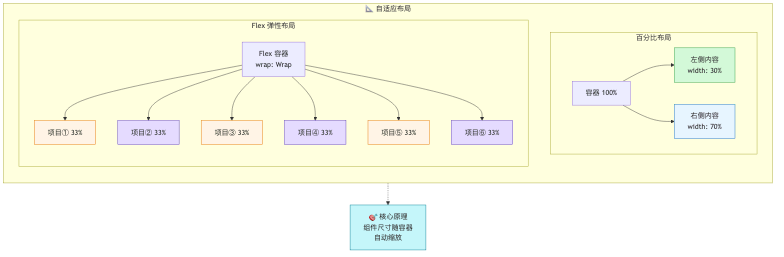
图 7.3.1 自适应布局
| 布局方式 | 适用场景 | 特点 |
|---|---|---|
| 百分比布局 | 固定比例分配 | 左右区域按比例分配空间 |
| Flex弹性布局 | 动态网格 | 自动换行,均匀分配 |
7.3.2 响应式布局
根据断点(breakpoint)自动切换不同的布局结构,实现一套代码适配多种屏幕:
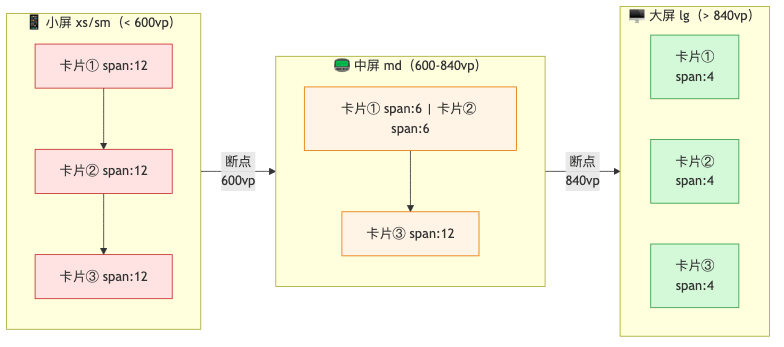
图 7.3.2 响应式布局
| 屏幕类型 | 断点范围 | 栅格策略 | 典型设备 |
|---|---|---|---|
| 小屏 xs/sm | < 600vp | 单列(span:12) | 手机竖屏 |
| 中屏 md | 600-840vp | 双列(span:6) | 平板、手机横屏 |
| 大屏 lg | > 840vp | 三列(span:4) | PC、大屏平板 |
7.3.3 交互事件归一
统一处理不同设备的输入事件,开发者无需关心具体输入方式:
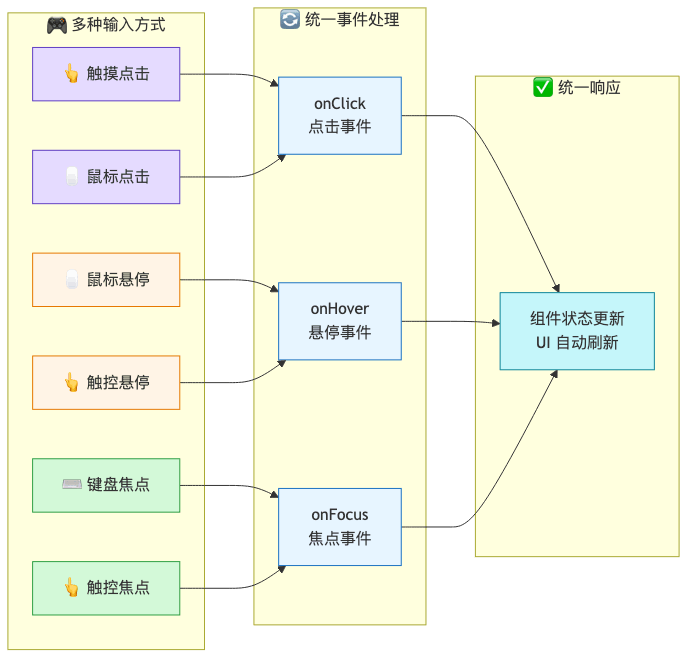
图 7.3.3 交互事件归一
| 统一事件 | 支持的输入方式 | 说明 |
|---|---|---|
| onClick | 触摸点击、鼠标点击 | 点击交互统一处理 |
| onHover | 鼠标悬停、触控悬停 | 悬停状态统一处理 |
| onFocus | 键盘焦点、触控焦点 | 焦点管理统一处理 |
7.4 部署流程图
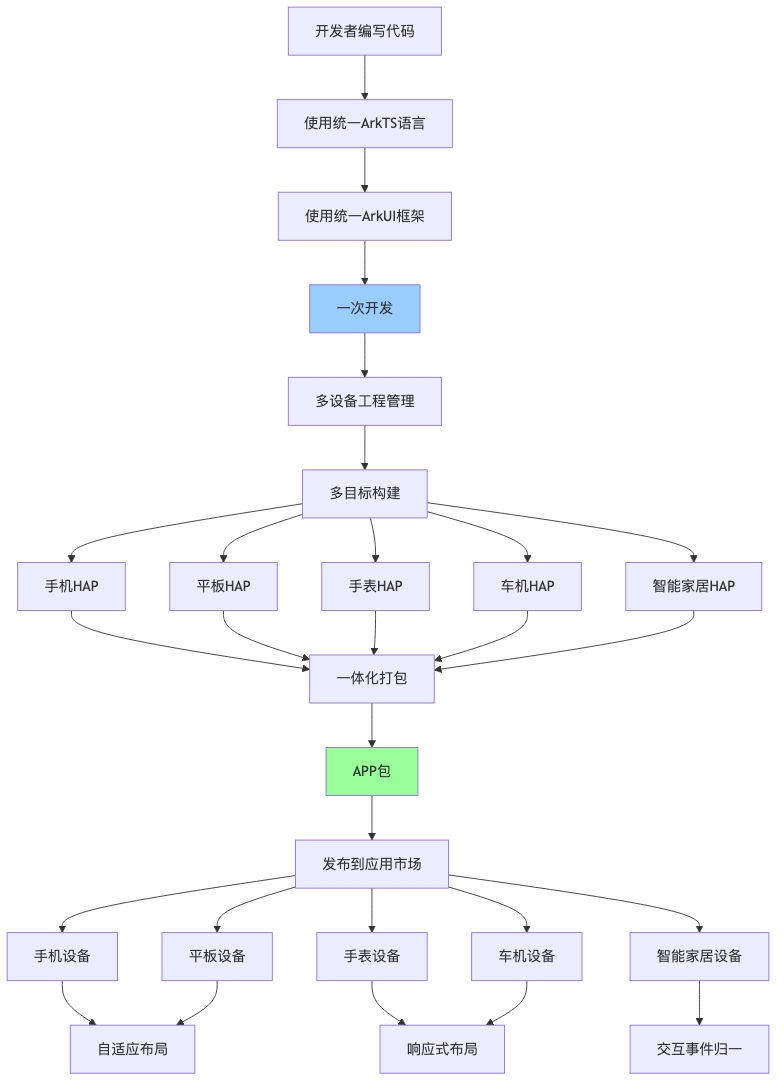
图 7.4 部署流程图
8. 性能数据与实证分析
本章要点: 基于 OSDI'24 论文的实验数据,全面了解 HongMeng 微内核的性能表现。
8.1 IPC 性能对比
根据论文在 Raspberry Pi 4b 上的基准测试:
| 配置 | 往返延迟 (Cycles) | 说明 |
|---|---|---|
| IC0-IC0 | 18 | 无隔离,间接函数调用 |
| IC1-IC1 | 502 | 内核空间机制隔离 |
| IC2-IC2 | 1439 | 完整用户空间隔离 |
| seL4 | 1376 | 业界知名微内核 |
| Fiasco.OC | 2883 | 传统微内核 |
关键结论: IC1-IC1 配置(适用于智能手机核心服务)比 seL4 快 2.7 倍。
8.2 应用启动速度提升
测试 Top 30 AOSP 应用的冷启动时间:
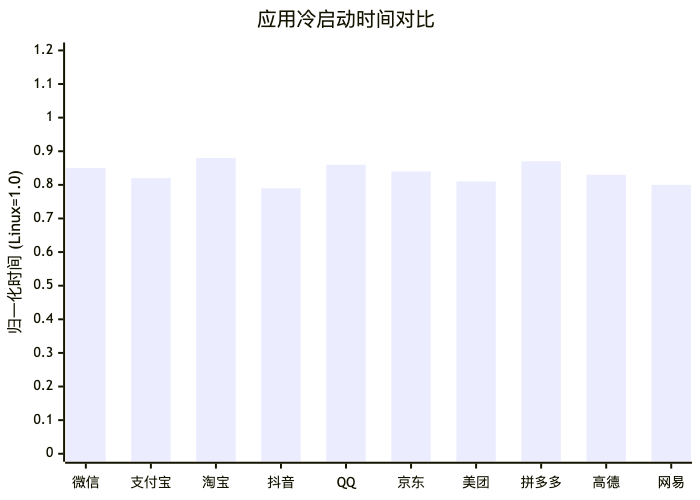
图 8.2 应用启动速度提升
- 几何平均: HongMeng 比 Linux 快 17%
- 原因: 更轻的系统负载和定制调度策略
8.3 系统负载降低
典型场景下执行指令数对比:
- 几何平均: HongMeng 比 Linux 轻 19%
- HongMeng 的技术显著降低了最小化和细粒度访问控制的开销
8.4 场景化性能数据
8.4.1 智能路由器
| 指标 | 改进 |
|---|---|
| 系统内存占用 | 减少 30% |
| 支持客户端连接数 | 增加 30% |
8.4.2 智能汽车
| 指标 | 改进前 | 改进后 | 提升 |
|---|---|---|---|
| 冷启动时间 | 1.5s | 0.6s | 减少 60% |
| 跨域通信延迟 | 250μs | 100μs | 减少 60% |
8.4.3 智能手机
| 指标 | 改进 |
|---|---|
| 应用启动时间 | 缩短 17% |
| 帧丢失次数 | 减少 10% |
| 系统负载 | 降低 19% |
8.5 安全认证成果
HongMeng 微内核已获得业界最高级别安全认证:
| 认证 | 级别 | 说明 |
|---|---|---|
| ASIL-D | 最高级 | 汽车安全完整性等级 (ISO 26262) |
| CC EAL 6+ | 最高级 | 通用准则评估保证级别 (ISO/IEC 15408) |
代码规模:
- 核心内核: 9 万行代码(C 语言受限子集)
- OS 服务总计: 超过 100 万行代码
部署规模:
- 部署在数千万台设备上
- 覆盖智能路由器、智能汽车、智能手机
- 通过 AOSP CTS/VTS 测试套件
9. 总结与展望
9.1 架构创新点总结
HarmonyOS 在系统架构层面实现了多项关键创新:
| 创新领域 | 核心技术 | 主要收益 |
|---|---|---|
| 微内核设计 | 差异化隔离等级 (IC0/IC1/IC2) | IPC 性能提升 3 倍 |
| IPC 优化 | 同步 RPC 式快速路径 | 解决资源管理三大问题 |
| 访问控制 | 地址令牌机制 | 访问性能提升 87 倍 |
| 驱动复用 | 驱动容器 + 孪生驱动 | 复用 700+ Linux 驱动 |
| 分布式能力 | 软总线 + 硬件虚拟化 | 实现超级终端体验 |
| 图形渲染 | 后端统一渲染 + DDGR | 无层数限制,帧丢失减少 10% |
| 多端部署 | 一次开发多端部署 | 开发效率大幅提升 |
9.2 生态建设现状
- 设备覆盖: 手机、平板、手表、电视、车机、音箱、智能家居等全场景
- 开发者工具: DevEco Studio 持续完善
- API 能力: 持续扩展,覆盖绝大多数应用场景
- 应用生态: 主流应用逐步适配
9.3 未来发展方向
- 微内核演进: 持续优化 IPC 性能,扩展差异化隔离应用场景
- 分布式能力增强: 更智能的设备发现和任务调度
- AI 融合: 深度集成 AI 能力,提供智能化系统服务
- 生态扩展: 吸引更多开发者和合作伙伴加入
参考资料
学术论文
- Haibo Chen, Xie Miao, Ning Jia, et al. "Microkernel Goes General: Performance and Compatibility in the HongMeng Production Microkernel", 18th USENIX Symposium on Operating Systems Design and Implementation (OSDI'24), July 2024.
官方文档
-
HarmonyOS 操作系统原理和关键技术(华为开发者培训课程)
-
HarmonyOS 开发者文档
-
OpenHarmony 技术文档
扩展阅读
-
鸿蒙系统架构笔记
-
QoS 技术百科(华为)
本文最后更新于 2026-01-23。如有技术问题或建议,欢迎讨论交流。
赋能鸿蒙PC开发者,共建全场景原生生态,共享一次开发多端部署创新价值。
更多推荐
 3
3 2
2- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)